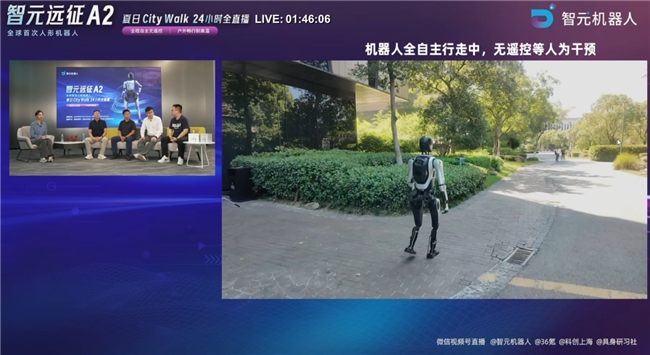
2025 年 8 月 17 日 8:20 至 8 月 18 日 8:20,智元机器人在上海浦东新区启动 “夏日 City Walk” 24 小时全直播活动,其全尺寸人形机器人远征 A2 完成全球首次高温环境下完全自主的 24 小时行走作业挑战。本次直播选址上海浦东新区,全程模拟真实户外环境 —— 路面涵盖柏油、砖石等多种材质,沿途设置锥桶、减速带等障碍,且遭遇高温(日间最高气温超 35℃)、夜间弱光等复杂条件。作为全球首次全尺寸人形机器人 24 小时户外行走直播,其核心目标是验证远征 A2 的自主行走稳定性、环境适应性及硬件可靠性。直播中,远征 A2 全程无遥控干预,自主完成避障、路径规划、步态调整等动作,并通过 “热插拔换电” 技术实现快速补能 —— 整个换电过程简单便捷,即便是非技术人员也能快速操作。
在“人形机器人从‘能走’到‘走好’背后的那点事”访谈环节,会议邀请到智元机器人通用业务部总裁王闯、上海交通大学自动化与感知学院副院长魏飞明、上海人工智能协会秘书长钟俊浩、智元机器人研发代表曹旭担任访谈嘉宾,共同探讨“24小时行走”背后的意义和影响。
主持人(吕鑫燚):为什么需要这样一场24小时的行走直播?
王闯:去年我们实现200台量产时,机器人还有很多问题;到今年四五月份,已能连续行走一两百小时不摔倒,成熟度明显提升。经过最近几个月的测试,让我们确认机器人正以每月为单位快速迭代。这场直播是一次里程碑,象征着智元远征A2它能在日夜交替、不同环境下全自主行走,检验系统稳定性、换电效率等,让大家感受科技的快速发展。
魏飞明:我希望亲身观察机器人在24小时周期内的表现。在上海当前气候炎热,温度变化的情况下,智元远征A2能否维持稳定运行?昼夜交替带来的光照差异,对感知系统构成何种考验?此外,作为高校研究者,需通过实际场景明确机器人技术需求,为学生提供更明确的学习方向,并将这些需求带回院校,指导研究方向。

曹旭:我现在的心态既紧张又坦然。24小时的直播仅是我们日常工作的缩影,我们单台机器人累计行走已超数千小时,不关机连续运行时长可达数百小时,换电采用热插拔技术,更换后可立即恢复运行。本次直播是阶段性成果展示,旨在向公众呈现全自主状态下的机器人表现,同时吸纳各方反馈。行业需求繁杂,研发需遵循严谨节奏,将可行且具价值的功能逐步纳入开发体系,此次也是检验实验室成果在公众场景中的实际表现。
主持人:人形机器人是交叉学科,今天能走24小时,背后主要得益于什么?
王闯:这是复杂的系统工程,涉及大学几乎所有学科。机械结构、硬件、底层嵌入式是“肉体”,必须强健。去年机器人走几步就摔,摔了就坏,是实验室产品;今年量产机寿命达几千小时,稳定性和可靠性是行业里程碑。全自主行走还需要建图定位、路径规划、感知避障、运动控制,比如遇到障碍物会自己找反向路径。此外,多模态感知和大模型融合也很重要,机器人能描述看到的环境,甚至讲解展厅内容,这些都是技术突破。
钟俊浩:从行业看,是“软硬结合”的突破。中国在软硬结合的工程能力上有优势,比如智元的国产化率已超95%,批量化生产能力提升快。同时,全自主技术的迭代(如无摇控行走、动态避障)是关键,这背后是算法、传感器、硬件的协同进步。
魏飞明:高校层面,多学科融合是支撑。机器人需要机械设计、控制算法、感知技术等交叉协作,我们在智能方向的研究,正为机器人的环境适应、动态决策提供理论基础。比如针对光照变化对感知的影响,我们通过多传感器融合算法优化,提升稳定性。
曹旭:从研发端看,是“全自主能力”的打磨。我们通过大量测试(几千小时连续行走)验证运动控制、换电效率等,同时融入多模态感知和大模型,让机器人能理解环境、规划路径。另外,“正向设计”思路尤为重要,在明确场景需求后,硬件和软件按节奏迭代,确保每个版本都能解决实际问题。
主持人:智元在硬件上趟过很多“坑”,有什么方法论可分享?现阶段对硬件更关注性能、性价比,还是全方位优势?

王闯:方法论有两点:一是正向设计,先明确产品需求,再定自由度、传感器配置等,避免量产后代改困难;二是把握迭代节奏,科研样机可手动调,但量产需每台稳定,需锁定关键版本的设计,如T1版验证核心功能,T2版迭代优化,通过TRC(硬件锁定)测试后再开模,确保团队协同有序。
至于优先级,不可能追求“全行业第一”,否则成本太高。我们先保证硬件基础能力不弱,再聚焦量产和稳定性,在此基础上发展满足场景需求的软件算法。比如展厅场景更需要交互智能,而非单纯炫技。
曹旭:补充一点,硬件研发需“留冗余”。比如预留足够算力、适配多种传感器,为软件迭代留空间。我们早期先打磨“底盘”,去年Q4机器稳定后,才逐步加入交互、避障等算法,这是“硬件打底、软件迭代”的节奏。
主持人:智元的本体随场景调配,大脑层面的模型或交互感知能力是否有场景适配?安全性上有哪些措施?
曹旭:有场景适配。比如座舱环境封闭安静,语言交互简单;但机器人面对开放场景(多人、嘈杂),需优化语音识别、动态避障。我们会接入场景化知识库(如展厅的产品信息、景区的景点介绍),快速适配垂类需求。
王闯:安全是我们投入最大的领域之一。远征A2是行业内唯一获中美欧三地安全认证的机器人,通过了几千条安全校验,包括本体设计、软件稳定性、异常处理等。我们内部还有严格测试标准,比如8台机器60小时压力测试120小时连续行走测试,现在正做720小时测试,确保量产机的安全性和可靠性。
五、自主导航能力如何?场景部署效率怎样?
主持人:远征的自主导航能力如何?实际场景部署需要多久?
曹旭:自主导航能实现“建图后全自主”,先教机器人环境和目标点,之后它能自主规划路径,遇到堵路会反向绕行。动态避障也没问题,比如避开行人、静态障碍物,速度慢给了足够反应时间。部署很快,熟练操作的话15分钟就能完成展厅建图和任务设置,我们甚至教过三年级学生,1小时内就能学会。
王闯:展厅场景中,机器人能自主迎宾、讲解,遇到观众提问会暂停讲解并回应,结束后继续按路线行进,完全解放人力。对比依赖摇控的机器人,我们的优势是泛化性,不用每个场景配专人控制,真正能商业化落地。
主持人:当下具身智能最大的挑战是什么?
王闯:行业“非共识太多”,比如关节技术路线(丝杠还是旋转关节)、算法驱动方式(纯数据驱动还是规则+数据)、形态设计(人形还是轮式)等,都有争议。从业者需不断学习,迭代认知,避免陷入固有思维。
钟俊浩:缺乏像OpenAI那样专注基础数据的企业。比如婴儿学步的完整数据,若能系统采集,对机器人步态优化会有颠覆性作用,但这类“傻事”需要长期投入。
魏飞明:核心是“认知-理解-预测”的递进,需要构建统一的数据与知识表征,同时推动多学科融合,甚至结合艺术等领域,让机器人更“拟人”。
曹旭:数据与算法的闭环,操作类数据稀缺,仿真数据还在探索,如何让“数据-模型-本体-场景”形成飞轮,是行业共同的挑战。
主持人:机器人大概需要多久换一次电?长时间作业如何验证?
曹旭:单块电池持续行走约2.5小时,站立待机约3小时,正常工作建议2小时换一次。电池快没电时会主动提示。长时间验证有严格流程,包括可靠性测试、本体测试、软件测试,工厂还有压测,有上千条测试用例,每轮发布前多轮迭代修复,确保达标。
主持人:机器人的自主导航和自动驾驶是否完全一样?

曹旭:类似但有差异。自动驾驶在结构化道路,机器人面对非结构化场景(如展厅、商场),但SLAM导航技术成熟。最大区别是需求不同:汽车要快速到终点,机器人在展厅需兼顾行走、讲解、交互,更强调“柔顺性”。
这场访谈不仅解码了智元远征A2“24小时全自主行走”的技术密码,更勾勒出人形机器人从“实验室突破”到“场景落地”的核心逻辑:从“能走”到“走好”,从来不是单一技术的突进,而是“硬件可靠性-软件鲁棒性-算法智能性-场景适配性”的系统协同,是产业端的工程化能力、科研端的多学科融合、行业端的标准共建共同作用的结果。
正如嘉宾们所言,24小时直播是一个里程碑,它标志着人形机器人已具备“真实世界生存能力”,但更重要的是,它揭示了未来方向:需要更多基础数据的积累、更紧密的产学研协同、更清晰的行业标准,才能让机器人从“展厅演示”真正走进“千行百业”。这场跨越,既是技术迭代的见证,更是生态共建的起点。







CopyRight@2010-2026 中金网 All Right Reserved
中金财讯:关注全球财经动态把握市场最新脉动!